On Monday 30 September 2024, I had the pleasure of participating in the first AI Café 2024 debate this year, organized by Christophe Schommer and his team. The panel featured insightful contributions from Evangelia Markidou, Patrick Glauner and Philip Treleaven, with Nora Schleich skillfully moderating the session. It was a fantastic debate – congratulations to everyone involved!
I used ChatGPT to refine and enhance my original draft report on the session, titled AI for the Labour Market: Blessing or Curse ?
Questions :
- Do we need AI?
- Should AI be regulated?
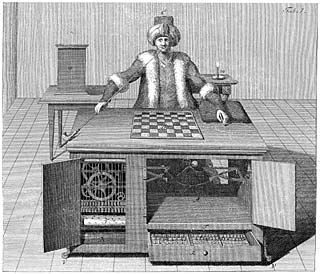
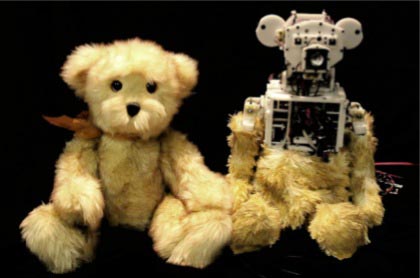
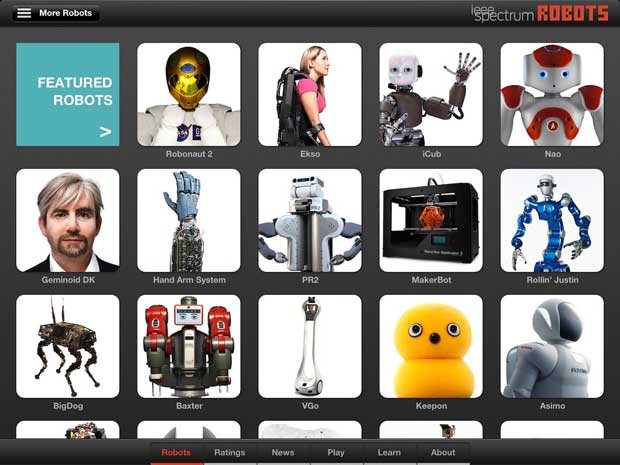
- Is it important to combine AI and robotics?
- Can AI help enable a four-day workweek?
- Why does AI assist in creative work but not simple chores like doing the dishes?
- With AI, will we still need to learn skills like writing, calculating, and coding?
- Does AI risk introducing standardization in creative output?

Facts :
- A calculator is useless if you don’t understand the basics of numbers and calculation; the same is true for AI tools.
- The United States is a single country, China is a single country, but the EU consists of 27 countries, each with different values.
- The real drivers of AI are not countries but large corporations, such as GAFAM (Google, Apple, Facebook, Amazon, Microsoft), Alibaba, and others.
- OpenAI tools are relatively affordable.
Examples :
- Jobs have always evolved — most jobs from 100 years ago no longer exist.
- Today, employees need skills in Word, Excel, and other Microsoft tools. Tomorrow, the same will be true for AI.
- Google disables some features in its tools within Europe due to regulation, which weakens the experience for end-users.
- WikiHow data was removed from a large language model due to regulatory requirements.
Statements about AI :
- AI is an innovation tsunami – you either ride the wave or get left behind.
- The EU is like a “sleeping beauty” when it comes to AI – how can we awaken it?
- Decision-making remains a critical human skill.
- Many AI models are biased because their training datasets are flawed or incomplete.
- Mass unemployment due to AI isn’t the real problem – today’s concern is an aging population.
- Most AI knowledge is freely available.
- Excessive regulation reduces Europe’s ability to compete with Asian countries.
- Ambition matters more than skills.
- Expecting everyone to bring creativity into prompt engineering is unrealistic.
- Company messaging should be strategic: instead of saying that AI will reduce salaries by half, say that it will double productivity with the same staff.
- Risk aversion is a significant issue within the EU.
- Europe lacks significant AI players on the global stage.

Statements about Regulation :
- There is too much regulation in Europe – not only the AI Act, but also related to personal rights, copyright, and data protection.
- China tends to innovate first and regulate later, while the EU regulates first, often missing opportunities to innovate.
- Regulations can pose challenges for open-source projects.
- Big companies pressure governments for regulation to avoid competition.
- Overregulation can hinder start-ups.
- Innovation requires experimentation, which in turn requires freedom.
Statements about Society :
- Competition is inherent to human nature – it’s one of the reasons we have progressed.
- In Japan, people tend to prioritize collectivism, whereas in Europe, individuality is more prevalent.
- Students from poorer countries are often more ambitious than those from wealthier nations.